The language LISA is aiming at the formalized description of programmable architectures, their peripherals and interfaces. It was originally developed to close the gap between purely structural oriented languages (VHDL, Verilog) and instruction set languages for cycle-accurate simulation purposes of a wide range of modern programmable architectures (DSPs and microcontrollers). The language syntax provides a high flexibility to describe the instruction set of various processors, such as SIMD, MIMD and VLIW-type architectures. Moreover, processors employing heavy pipelining can be easily modeled. This includes the ability to describe architectures with complex execution schemes as e.g. out-of-order execution of instructions.
The process of generating software development tools and synthesizing the architecture requires information on architecture properties and the instruction set definition as depicted in the following table.
| | memory
model | resource
model | behavior
model | instruction
set model | timing
model | micro-
architecture
model |
| HLL compiler | register allocation | instruction scheduling | instruction selection | - | instruction scheduling | - |
| assembler | - | - | - | instruction trranslation | - | - |
| linker | memory allocation | - | - | - | - | - |
| simulator | simulation of storage | - | operation simulation | decoder/ disassembler | operation scheduling | - |
| HDL generator | basic structure | write conflict resolution | - | instruction decoder | opereation schduling | operation grouping |
Table 1: LISA processor models
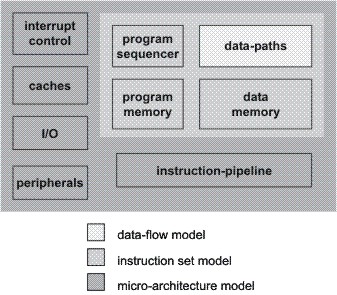
These requirements can be grouped into different architectural models - the entirety of these models constitutes the abstract model of the target architecture. The LISA machine description provides information consisting of the following model components.
-
The memory model lists the registers and memories of the system with their respective bit widths, ranges, and aliasing. The compiler gets information on available registers and memory spaces. The memory configuration is provided to perform object code linking. During simulation, the entirety of storage elements represents the state of the processor which can be displayed in the debugger. The HDL generator derives the basic architecture structure.
-
The resource model describes the available hardware resources and the resource requirements of operations. Resources reproduce properties of hardware structures which can be accessed exclusively by one operation at a time. The instruction scheduling of the compiler depends on this information. Moreover, the HDL code generator uses this information for resource conflict
resolution.
-
The instruction set model identifies valid combinations of hardware operations and admissible operands. It is expressed by the assembly syntax, instruction word coding, and the specification of legal operands and addressing modes for each instruction. Compilers and assemblers can identify instructions based on this model. The same information is used at the reverse process of decoding and disassembling. The HDL generator derives the instruction decoder
from this model.
-
The behavioral model abstracts the activities of hardware structures to operations changing the state of the processor for simulation purposes. The abstraction level of this model can range widely between the hardware implementation level and the level of high-level language (HLL) statements.
-
The timing model specifies the activation sequence of hardware operations and units. The instruction latency information lets the compiler find an appropriate schedule and provides timing relations between operations during simulation.
-
The micro-architecture model allows grouping of hardware operations to functional units and contains the exact micro-architecture implementation of structural components such as adders, multipliers, etc. This enables the HDL generator to generate the appropriate HDL code from a more abstract specification.
Besides this information provided by the LISA language, which is essential for retargeting the software development tools, one of the key aspects in architecture development is the ability to abstract on multiple levels of accuracy. However, it is of course mandatory that a working set of software development tools can be successfully generated independently of the abstraction level.